Closed
Description
I've been trying to get Pulsar to render the same output as P3D with perspective cameras and would very much appreciate if someone could take a look and point out an obvious misstep.
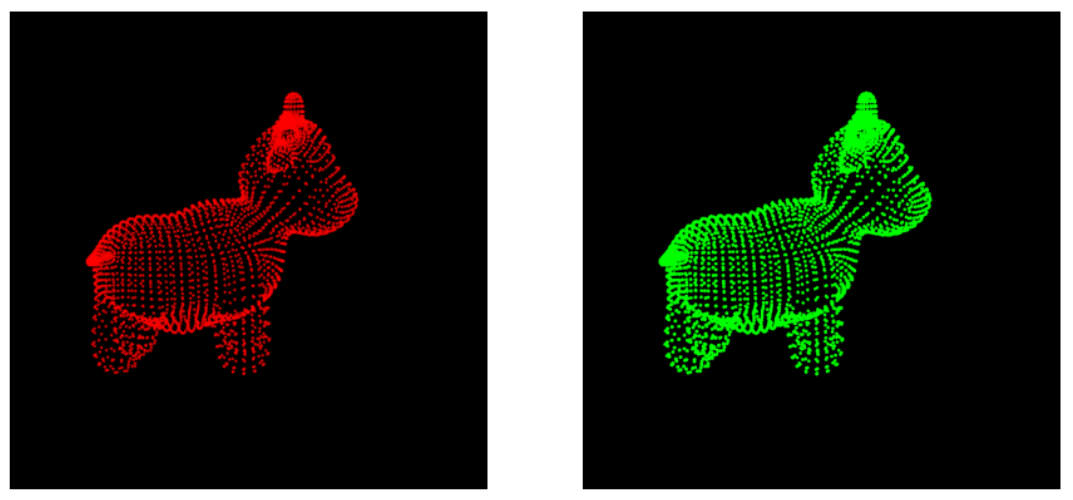
Below is an image of the output from FOVPerspectiveCameras for both Pytorch3d and Pulsar renderers:
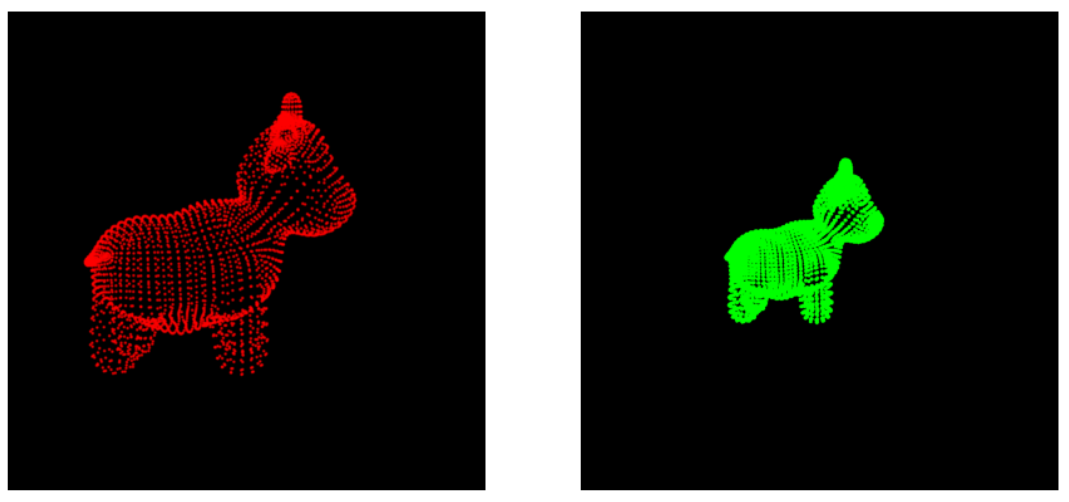
And here is the image generated when switching over to PerspectiveCameras
The following code is self contained and reproduces the above diagrams
import os
import sys
import torch
import pytorch3d
import torch.nn.functional as F
import matplotlib.pyplot as plt
# Util function for loading point clouds|
import numpy as np
# Data structures and functions for rendering
from pytorch3d.structures import Pointclouds
from pytorch3d.io import load_objs_as_meshes, load_obj
from pytorch3d.vis.plotly_vis import AxisArgs, plot_batch_individually, plot_scene
from pytorch3d.renderer import (
look_at_view_transform,
FoVOrthographicCameras,
PointsRasterizationSettings,
PointsRenderer,
PulsarPointsRenderer,
PointsRasterizer,
AlphaCompositor,
NormWeightedCompositor,
FoVPerspectiveCameras,
PerspectiveCameras
)
############## Mesh and Vertice creation
## setting up mesh with cute cow
!mkdir -p data/cow_mesh
!wget -P data/cow_mesh https://dl.fbaipublicfiles.com/pytorch3d/data/cow_mesh/cow.obj
!wget -P data/cow_mesh https://dl.fbaipublicfiles.com/pytorch3d/data/cow_mesh/cow.mtl
!wget -P data/cow_mesh https://dl.fbaipublicfiles.com/pytorch3d/data/cow_mesh/cow_texture.png
DATA_DIR = "./data"
obj_filename = os.path.join(DATA_DIR, "cow_mesh/cow.obj")
# Load obj file and grab points
device='cpu'
mesh = load_objs_as_meshes([obj_filename], device=device)
verts = mesh.verts_list()[0]
## [1x3] for p3d RGB
p3d_rgb = torch.zeros(len(verts),3).to(device)
p3d_rgb[:,0] = 1
## [1x4] for puls RGBA
puls_rgb = torch.zeros(len(verts),4).to(device)
puls_rgb[:,1] = 1
## red point clouds for p3d and green for pulsar
p3d_point_cloud = Pointclouds(points=[verts], features=[p3d_rgb])
puls_point_cloud = Pointclouds(points=[verts], features=[puls_rgb])
## rotation and translation convenience
R, T = look_at_view_transform(2.7, 0, 90)
## shared FOVperspective camera for both renderers
cameras = FoVPerspectiveCameras(znear=.1, device=device, R=R, T=T)
## rasterizers
p3d_raster_settings = PointsRasterizationSettings(
image_size=800,
radius = 0.008,
points_per_pixel = 10
)
################################
# radius is 10x bigger in pulsar
################################
puls_raster_settings = PointsRasterizationSettings(
image_size=800,
radius = 0.0008,
points_per_pixel = 10
)
p3d_rasterizer = PointsRasterizer(cameras=cameras, raster_settings=p3d_raster_settings)
puls_rasterizer = PointsRasterizer(cameras=cameras, raster_settings=puls_raster_settings)
## instantiate the renderers
p3d_renderer = PointsRenderer(
rasterizer=p3d_rasterizer,
compositor=AlphaCompositor()
)
## using the unified pulsar wrapper render
pulsar_renderer = PulsarPointsRenderer(
rasterizer=puls_rasterizer,
n_channels=4
).to(device)
p3d_image = p3d_renderer(p3d_point_cloud)
puls_image = pulsar_renderer(puls_point_cloud, gamma=(1e-5,),
bg_col=torch.tensor([0.0, 0.0, 0.0, 1.0],
dtype=torch.float32, device=device))
plt.figure(0, figsize=(15,15))
plt.subplot(1,2,1)
plt.axis('off')
plt.imshow(p3d_image[0, ..., :3].cpu().numpy())
plt.subplot(1,2,2)
plt.axis('off')
plt.imshow(puls_image[0, ..., :3].cpu().numpy())
plt.show()
############
## Excellent results for FOVPerspectiveCameras, next is PerspectiveCameras
## using camera intrinsics from the above FOV camera w/ defaults
K = cameras.compute_projection_matrix(
znear=.1,
zfar=100.0,
aspect_ratio=1.0,
fov=60.0,
degrees=True,)
## same R and T from above
pers_cameras = PerspectiveCameras(
K=K,
device=device,
R=R, T=T)
## rasterizers and renderers again
p3d_rasterizer = PointsRasterizer(cameras=pers_cameras, raster_settings=p3d_raster_settings)
puls_rasterizer = PointsRasterizer(cameras=pers_cameras, raster_settings=puls_raster_settings)
## instantiate the renderers
p3d_renderer = PointsRenderer(
rasterizer=p3d_rasterizer,
compositor=AlphaCompositor()
)
## using the unified pulsar wrapper render
pulsar_renderer = PulsarPointsRenderer(
rasterizer=puls_rasterizer,
n_channels=4
).to(device)
## pulsar renderer needs znear and zfar for perspectiveCameras
## get them from above
znear, zfar = cameras.znear, cameras.zfar
p3d_image = p3d_renderer(p3d_point_cloud)
puls_image = pulsar_renderer(puls_point_cloud, gamma=(1e-5,),
bg_col=torch.tensor([0.0, 0.0, 0.0, 1.0],
dtype=torch.float32, device=device,),
znear=znear, zfar=zfar)
plt.figure(1, figsize=(15,15))
plt.subplot(1,2,1)
plt.axis('off')
plt.imshow(p3d_image[0, ..., :3].cpu().numpy())
plt.subplot(1,2,2)
plt.axis('off')
plt.imshow(puls_image[0, ..., :3].cpu().numpy())
plt.show()